智能控制——神经网络控制
1 问题描述
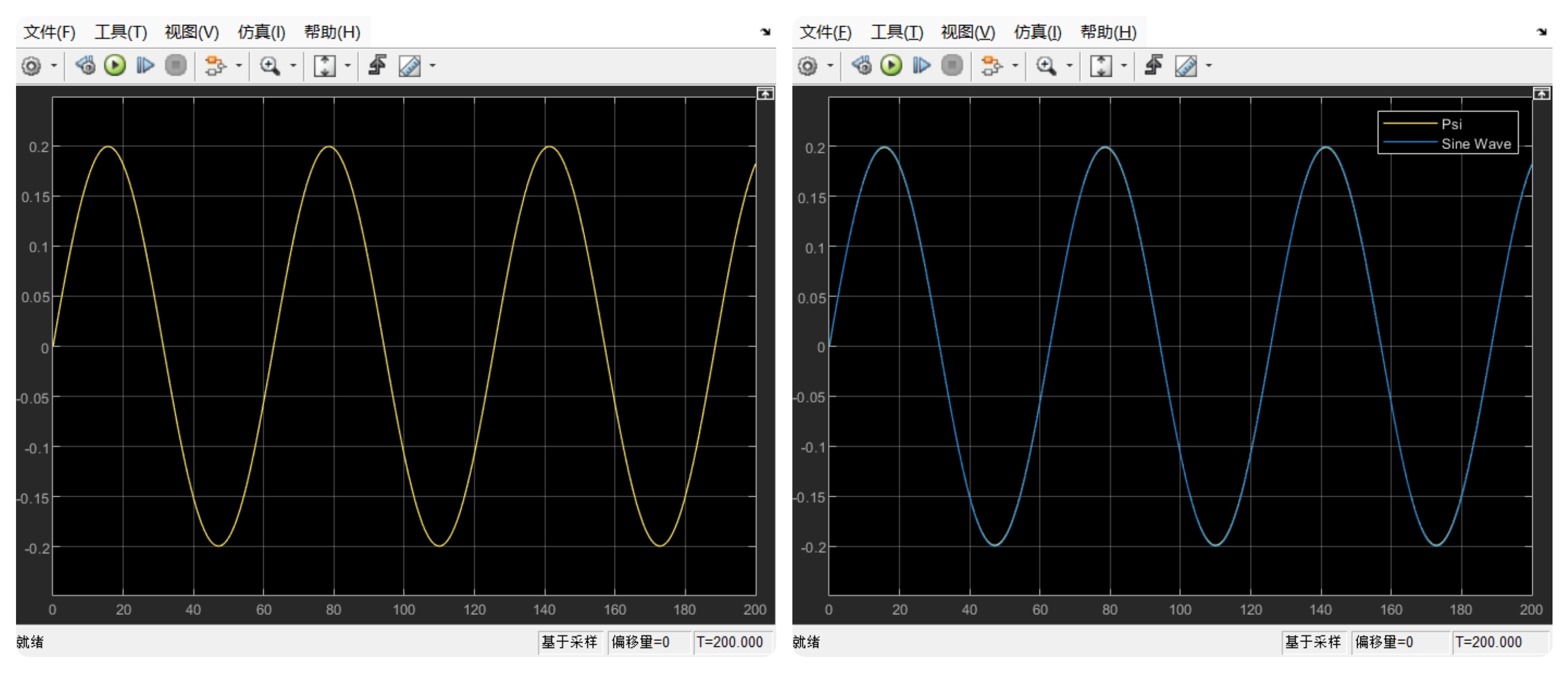
考虑与前面作业中相同的无人水面艇(USV)航向跟踪控制系统,通过调节舵角$δ$,使船舶航向$ψ$能够跟踪时变的参考航向$𝜓_{𝑟𝑒𝑓}(t)$,参考信号为:正弦信号$\psi_{ref}(t)=0.2sin(0.1t)$
(1)在matlab中利用已给的带扰动噪声系统模型采集系统的输入输出数据,采用BP神经网络作为辨识模型,建立USV的神经网络辨识模型,并分析辨识结果的精度。
(2)设计一个BP神经网络直接作为控制器,画出该直接神经网络控制系统的结构框图,利用梯度下降法,推导该神经网络控制器的权值在线更新律,并进行控制系统仿真,在 仿真中分别符号近似法和神经网络估计法估计未知系统Jacobian。
(3)用一个BP神经网络在线调整PID控制器的参数,画出该神经网络PID控制系统的结构框图,同样利用梯度下降法,推导神经网络的权值更新律,并进行控制系统仿真。
(4)借鉴模糊自适应相同的方式,设计针对仿射非线性USV模型的神经网络自适应控制器,给出控制律和自适应律,并进行仿真。(提示,模糊逼近可以用RBF神经网络逼近代替,RBF网络即为激发函数为高斯函数的前向网络)
2 神经网络辨识模型
$$
T\ddot{\psi}+KH(\dot{\psi})=K\delta+d(t)
$$
代入参数
$$
2\ddot{\psi}+0.8(\dot{\psi}+0.5\dot{\psi}^3)=0.8\delta+d(t)\
$$
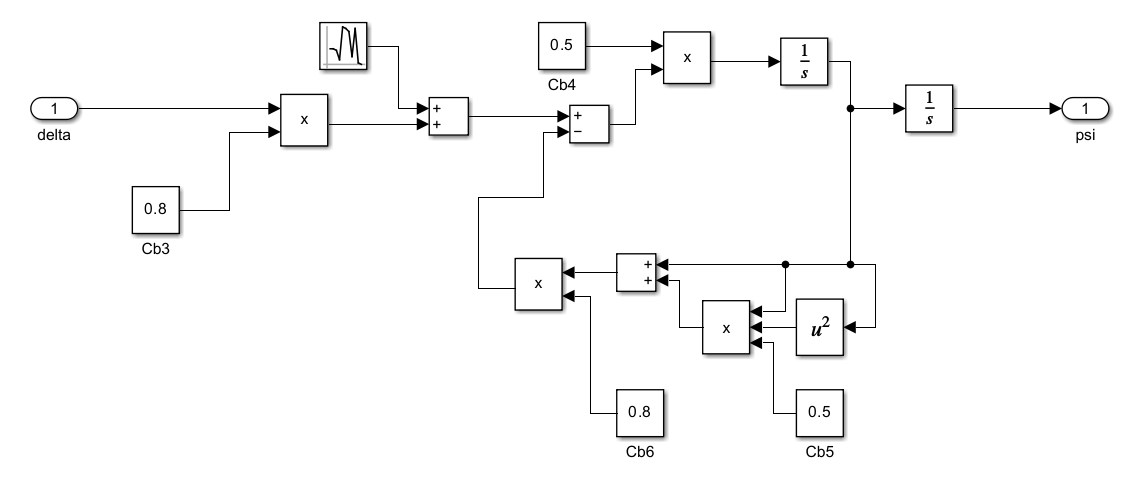
为方便训练将模型搭建为如下形式
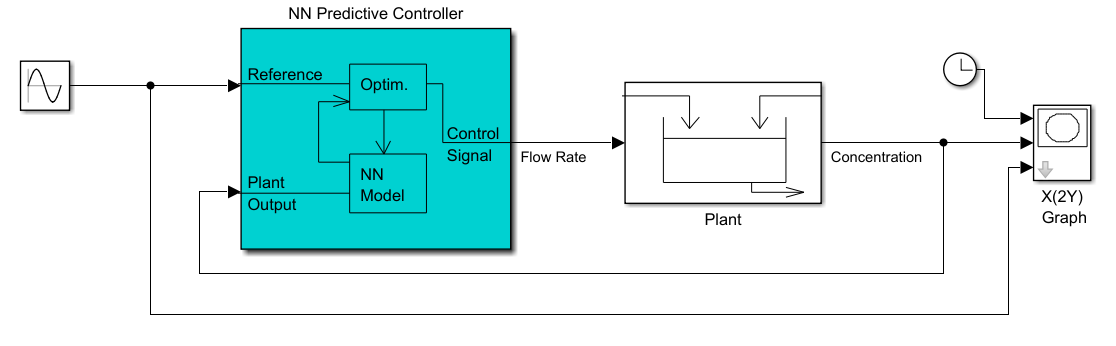
选用NN Predict Controller模块的Plant Identification
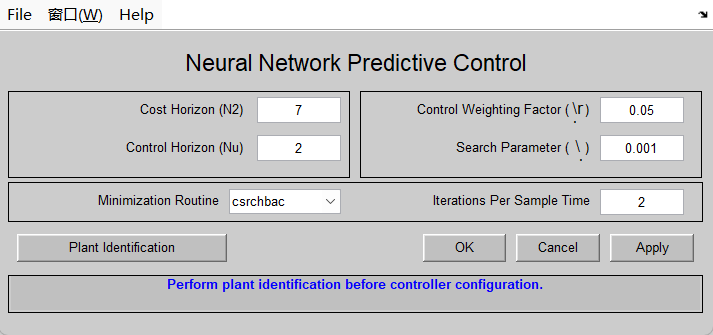
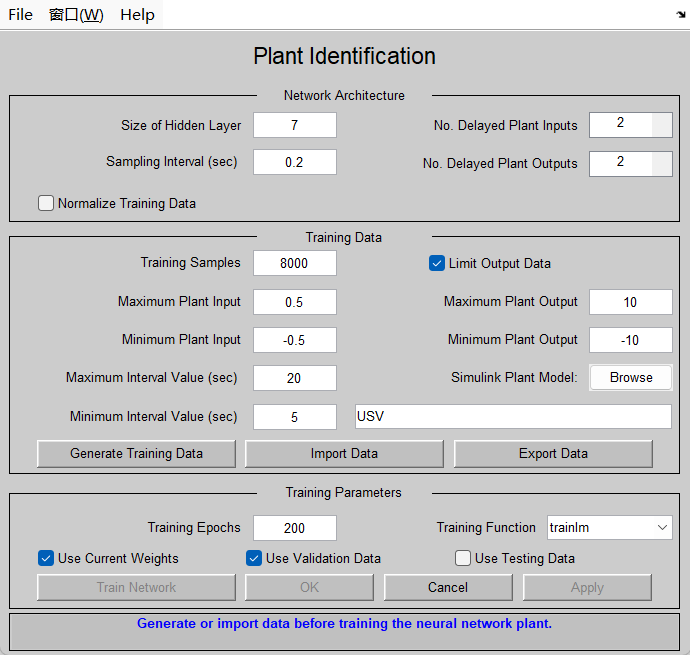
参数设置如图所示,训练数据输入δ范围限制为[-0.5,0.5],输出暂限制为[-10,10]
随机输入信号收集8000个样本
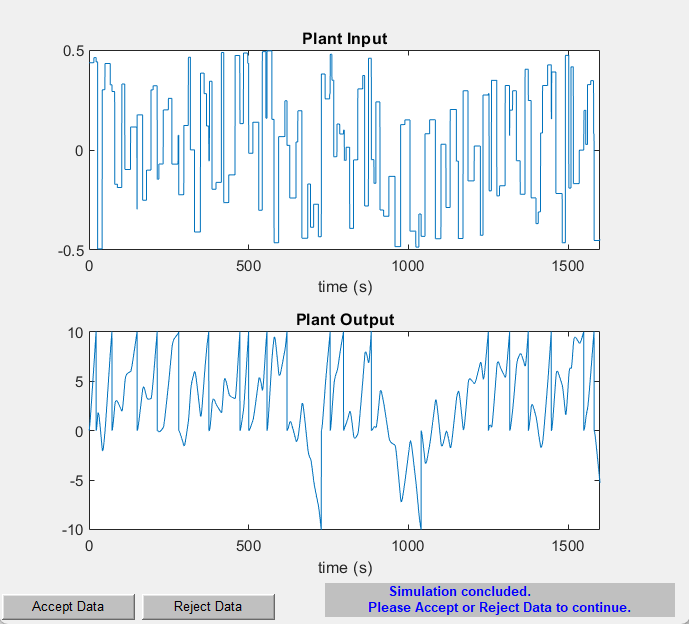
训练结果如图
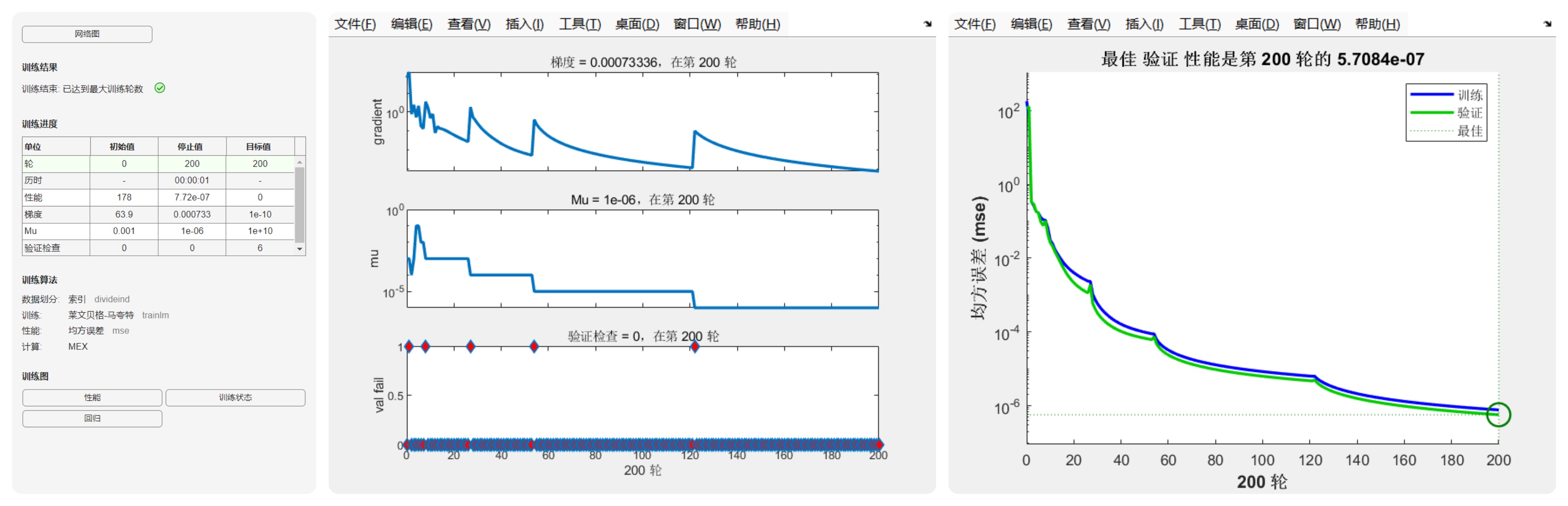
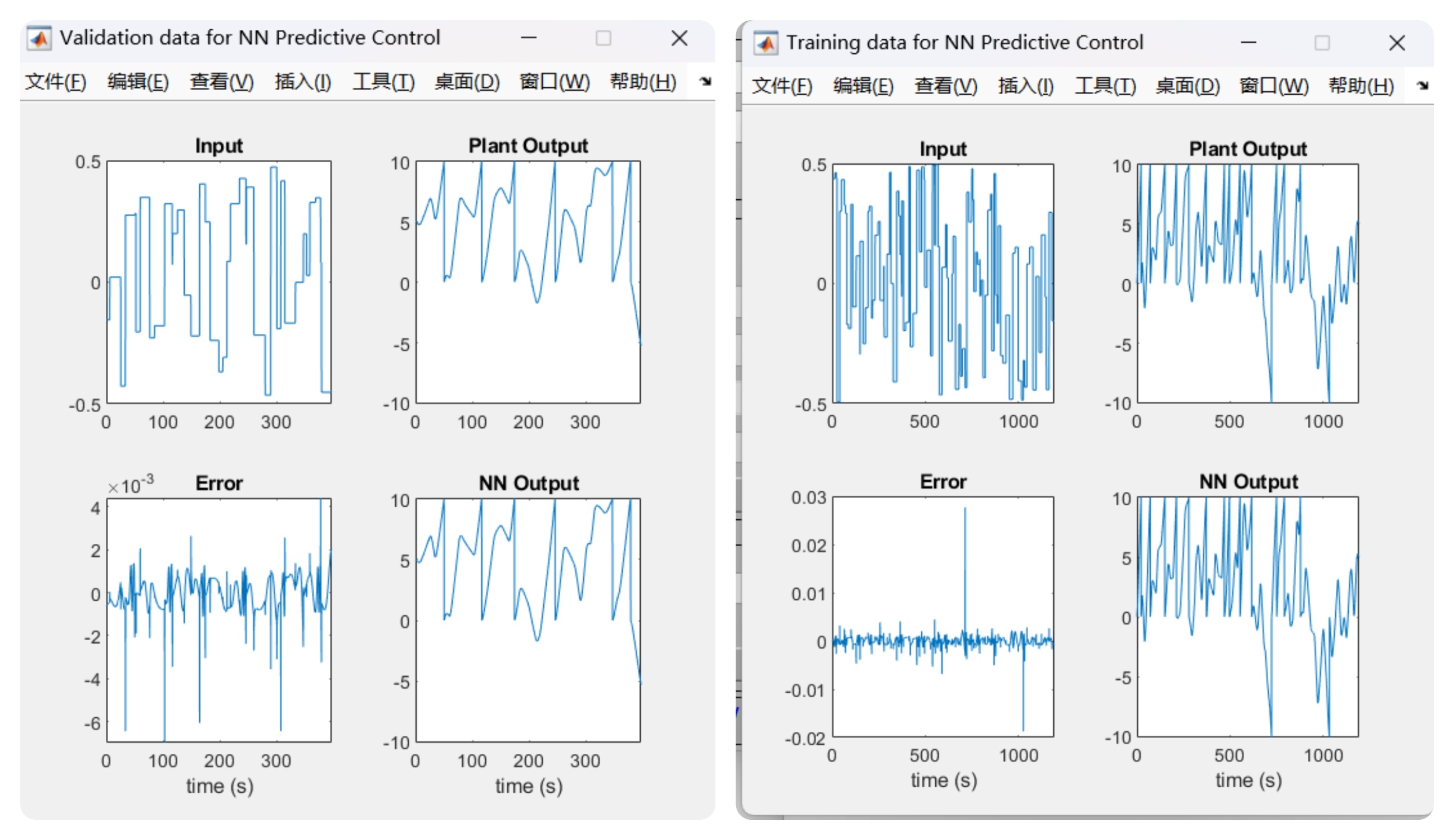
辨识精度较高
预测控制结果为:
3 神经网络控制器
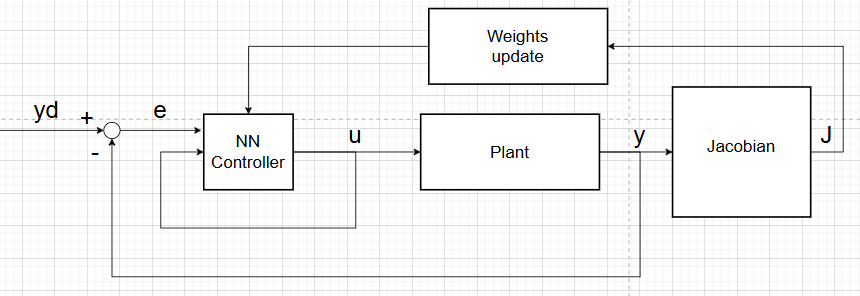
3.1 控制框图和控制律推导
控制器系统框图为
此处用的网络是三层3-5-1前馈BP网络:输入层$N_i=3$,隐藏层$N_h=5$,输出层$N_o=1$,激活函数选tanh
输出层梯度推导:用jacobian有$ \frac{\partial y}{\partial u}=J$,等效输出层误差信号$\delta_o(k)=-\frac{e(k)}{J(k)}$
性能指标:
$$
E(k) = \frac{1}{2} e^2(k)
$$
梯度下降:
$$
\Delta \mathbf{W}_2(k) = -\eta \frac{\partial E}{\partial \mathbf{W}_2}
$$
链式法则:
$$
\frac{\partial E}{\partial \mathbf{W}_2} = \frac{\partial E}{\partial u} \frac{\partial u}{\partial \mathbf{W}_2}
$$
其中:
$$
\frac{\partial E}{\partial u} = \frac{\partial E}{\partial e} \frac{\partial e}{\partial y} \frac{\partial y}{\partial u} = e(k)(-1)J(k)\
\frac{\partial u}{\partial W_2}=h^T(k)
$$
输出层权值更新律:
$$
\Delta \mathbf{W}_2(k) = \eta,\delta_o(k),\mathbf{h}^T(k) + \alpha,\Delta \mathbf{W}_2(k-1) \ \mathbf{W}_2(k+1) = \mathbf{W}_2(k) + \Delta \mathbf{W}_2(k)
$$
隐藏层误差信号为:
$$
\delta_h(k) = \left(\mathbf{W}_2^T(k)\delta_o(k)\right) \odot \left(1 - \mathbf{h}^2(k)\right)
$$
隐藏层权值更新律:
$$
\Delta \mathbf{W}_1(k) = \eta,\delta_h(k),\mathbf{x}^T(k) + \alpha,\Delta \mathbf{W}_1(k-1) \\ \mathbf{W}_1(k+1) = \mathbf{W}_1(k) + \Delta \mathbf{W}_1(k)
$$
3.2 仿真建模
由结果框图搭建出如下仿真模型
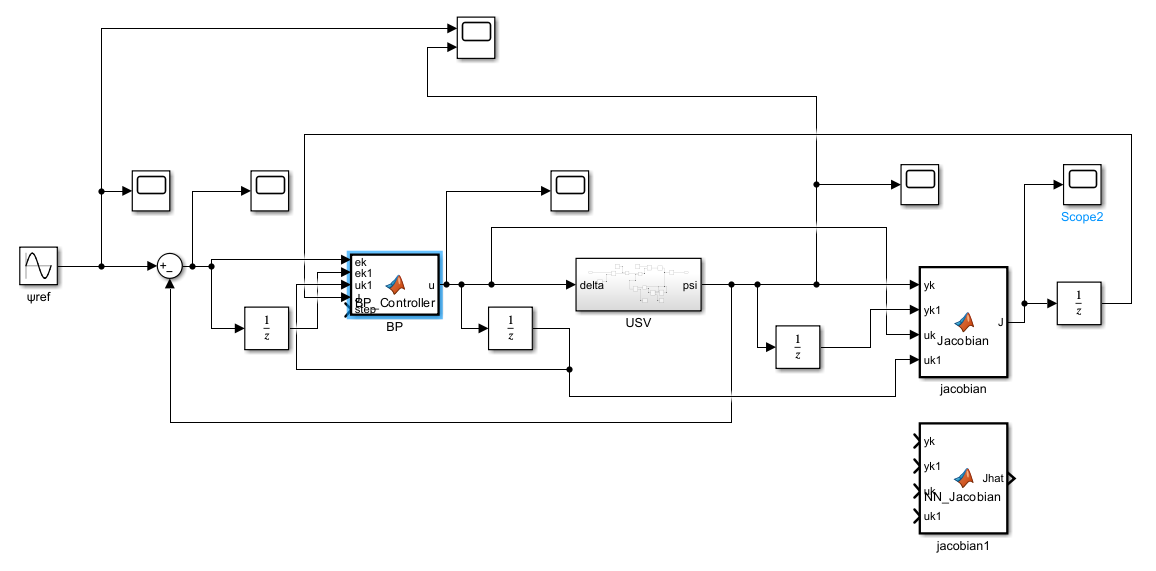
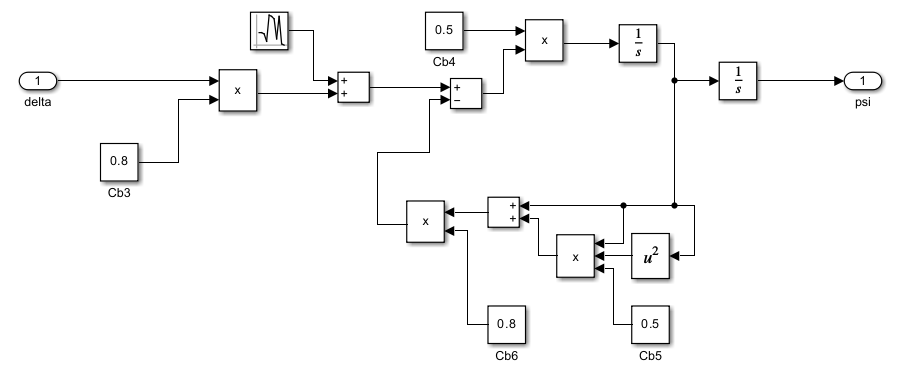
其中USV就是整个被控模型:
其中BP控制器代码为
1 | |
jacobian的计算方法可有符号近似法和神经网络估计法
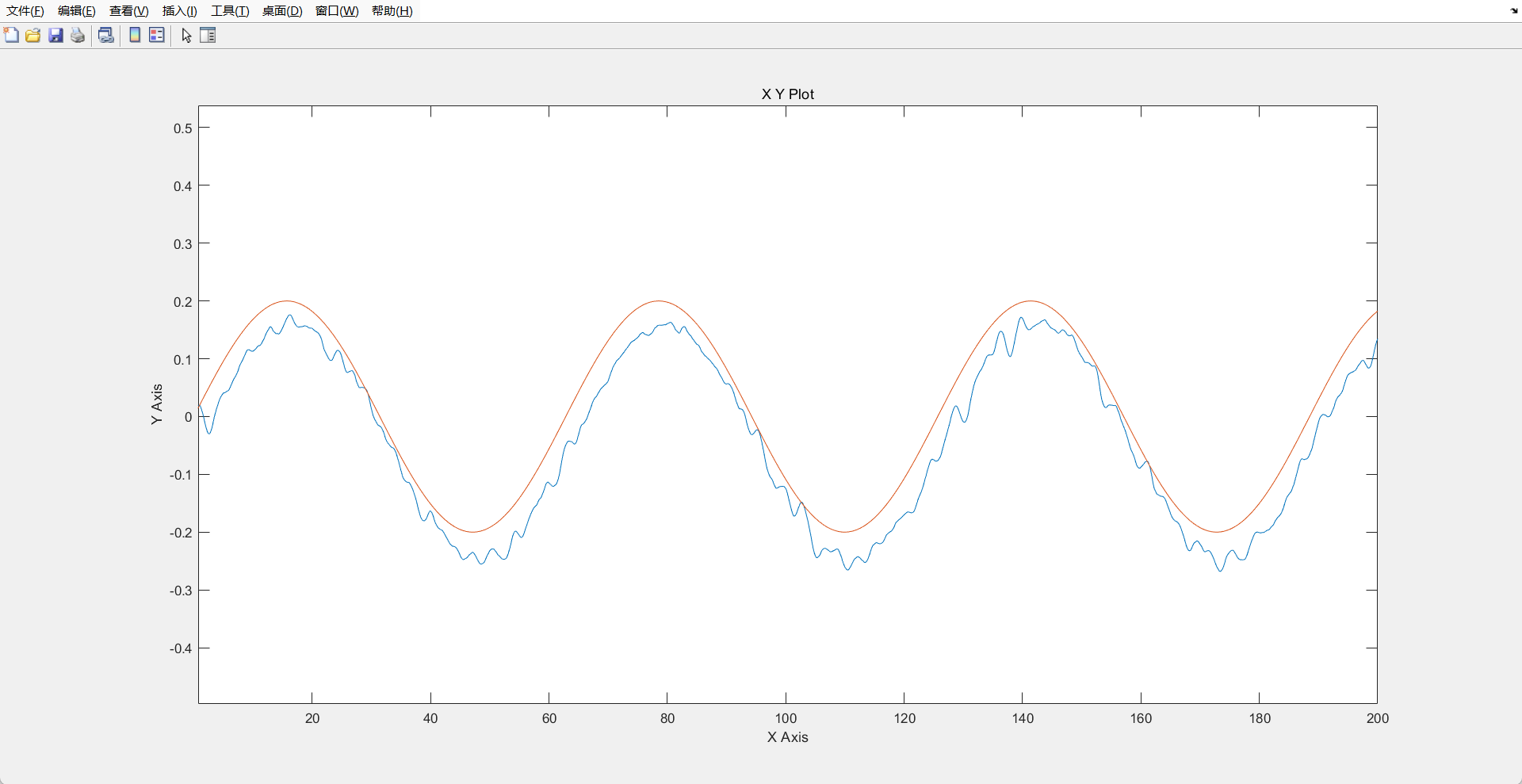
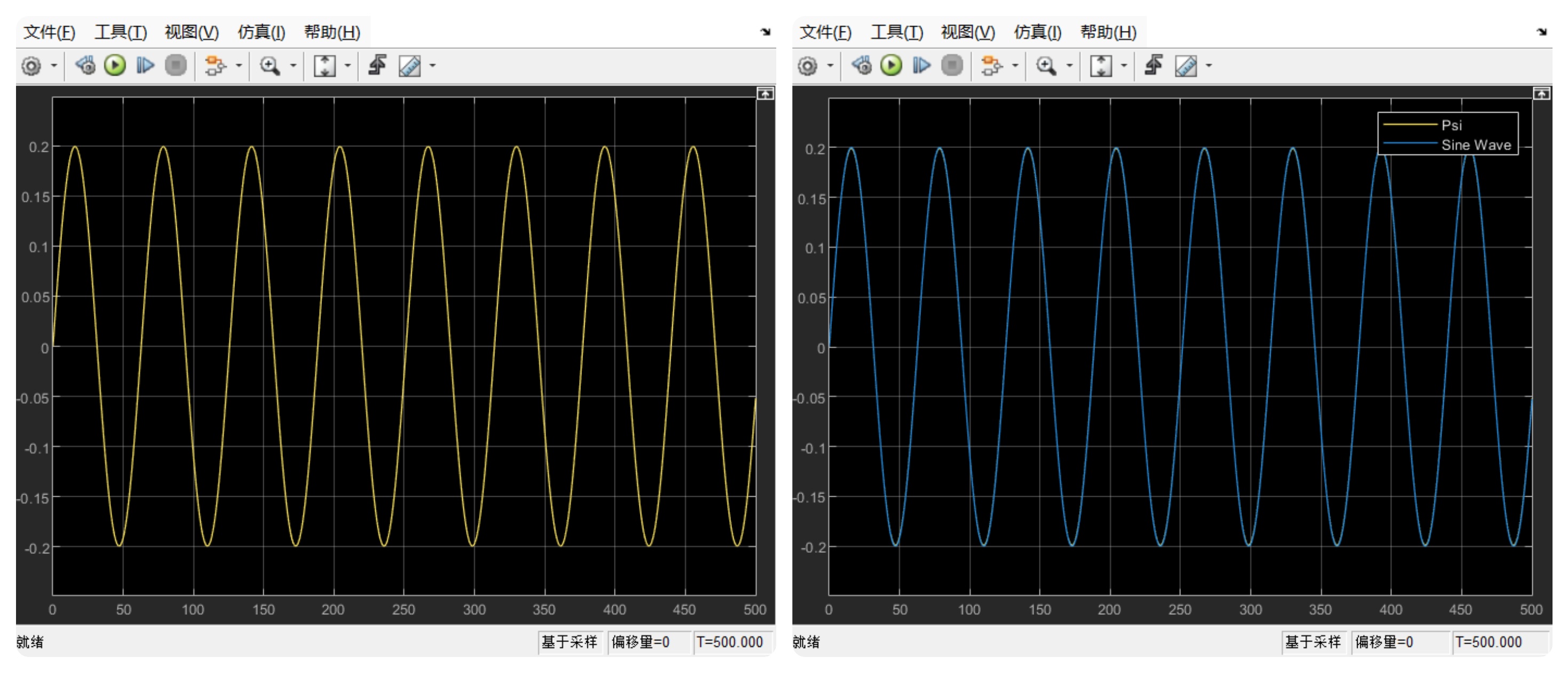
3.3 运行结果
3.3.1 符号近似法
1 | |
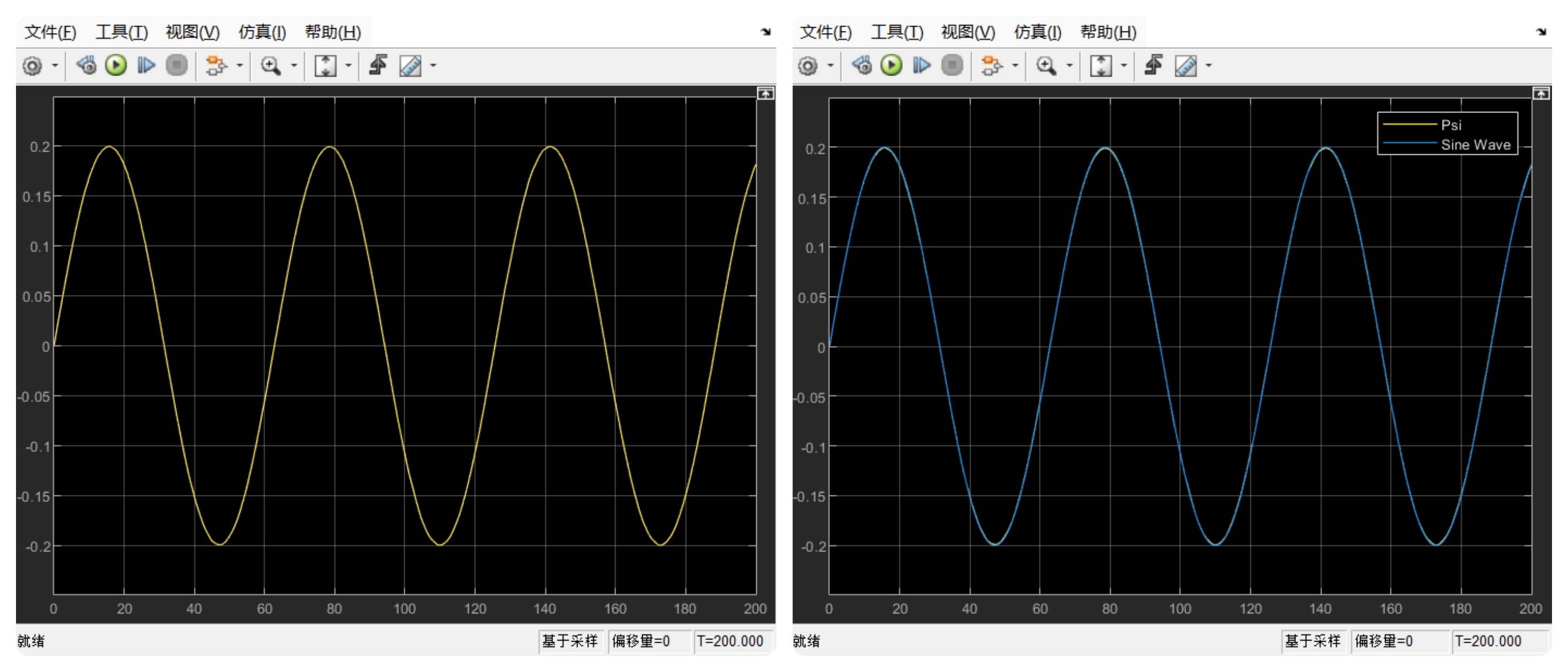
(左图为纯输出,右图为输出与参考信号对比)
3.3.2 神经网络近似法
1 | |
(左图为纯输出,右图为输出与参考信号对比)
用两种方法计算jacobian结果是一样的
4 神经网络PID控制器
4.1 结果框图和控制律
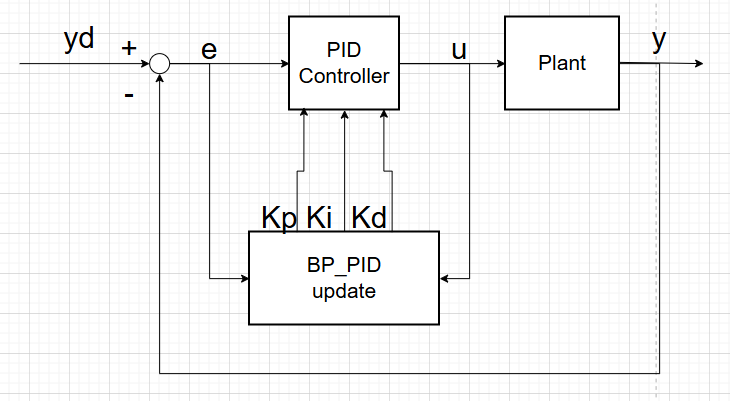
此处用的网络是三层3-5-1前馈BP网络:输入层$N_i=3$,隐藏层$N_h=6$,输出层$N_o=3$,激活函数选tanh
输出层梯度推导:令$J=e^2+0.05u^2$,$\delta_o= - \begin{bmatrix} J\ J\ J \end{bmatrix}$
性能指标:
$$
J(k) = e^2(k) + \lambda u^2(k), \quad \lambda = 0.05
$$
梯度下降:
$$
\mathbf{W}_2 \leftarrow \mathbf{W}_2 - \eta \frac{\partial J}{\partial \mathbf{W}_2}
$$
链式法则
$$
\frac{\partial J}{\partial \mathbf{W}_2} = \frac{\partial J}{\partial \Delta \mathbf{K}} \frac{\partial \Delta \mathbf{K}}{\partial \mathbf{W}_2}
$$
其中:
$$
\Delta \mathbf{K} = \mathbf{W}_2 \mathbf{h} \Rightarrow \frac{\partial \Delta \mathbf{K}}{\partial \mathbf{W}_2} = \mathbf{h}^T
$$
输出层权值更新律:
$$
\Delta \mathbf{W}_2(k) = \eta,\delta_o(k),\mathbf{h}^T(k) + \alpha,\Delta \mathbf{W}_2(k-1) \ \mathbf{W}_2(k+1) = \mathbf{W}_2(k) + \Delta \mathbf{W}_2(k)
$$
隐藏层误差信号为:
$$
\delta_h(k) = \left(\mathbf{W}_2^T(k)\delta_o(k)\right) \odot \left(1 - \mathbf{h}^2(k)\right)
$$
隐藏层权值更新律:
$$
\Delta \mathbf{W}_1(k) = \eta,\delta_h(k),\mathbf{x}^T(k) + \alpha,\Delta \mathbf{W}_1(k-1) \\ \mathbf{W}_1(k+1) = \mathbf{W}_1(k) + \Delta \mathbf{W}_1(k)
$$
4.2 仿真建模及结果
由系统框图得到如下建模
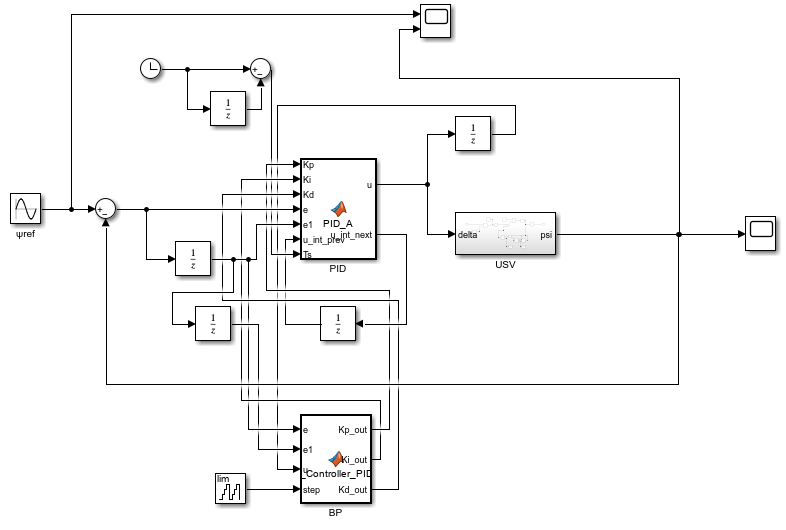
其中Ts是通过clock模块加unit delay模块计算得到的,step是通过counter limited模块计算得到的
PID模块代码为:
1 | |
BP_PID整定神经网络代码为:
1 | |
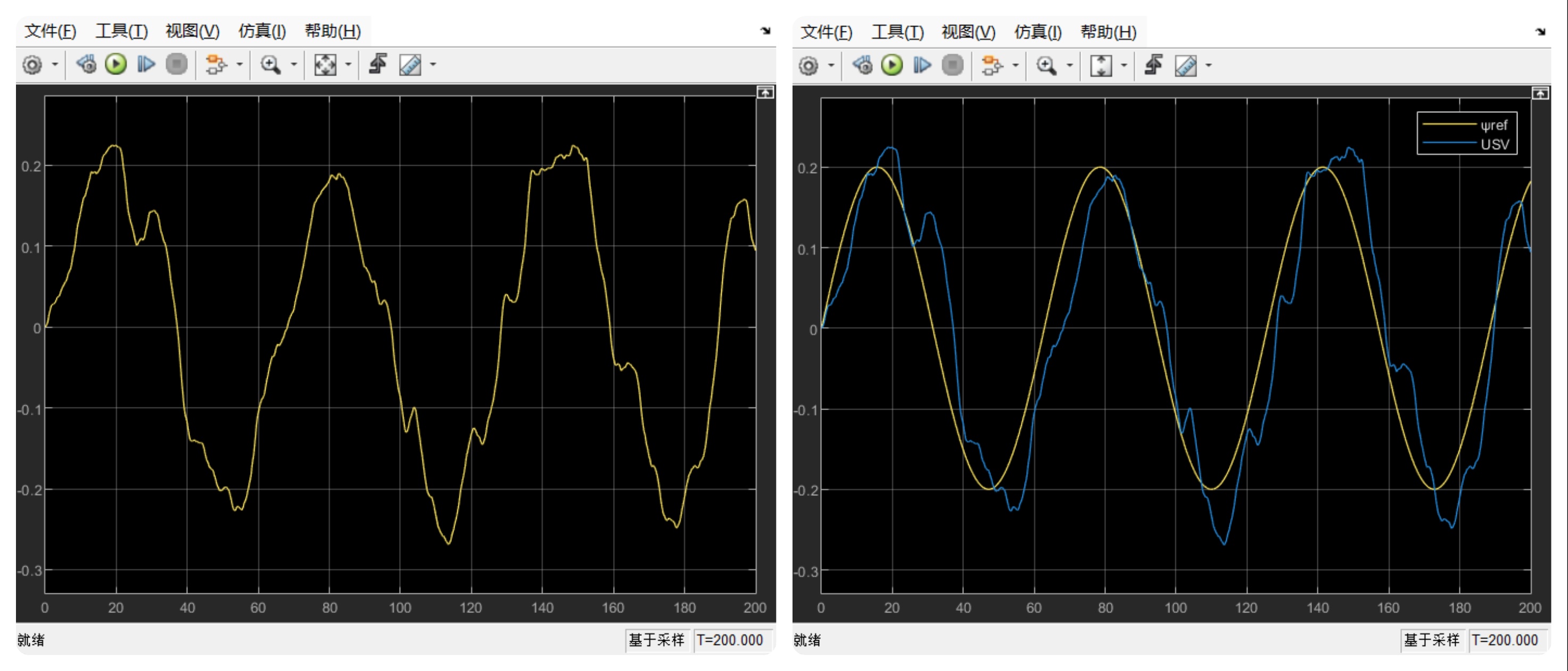
得到的结果为:(左图为纯输出,右图为输出与参考信号对比)
效果比神经网络直接控制更好,但是仍然存在大量波动。
5 神经网络自适应控制器
5.1 控制律和自适应律
仿射非线性形式:令$x_1=\psi$,$\dot{x_1}=x_2=\dot{\psi}$,$\dot{x_2}=0.4x_2+0.2x_2^3+0.4u$
$$
\ddot{\psi}=0.4\dot{\psi}+0.2\dot{\psi}^3+0.4\delta\
\begin{cases} \dot{x}_1 = x_2 \ \dot{x}_2 = 0.4x_2 + 0.2x_2^3 + 0.4u \end{cases}
$$
结果框图为:
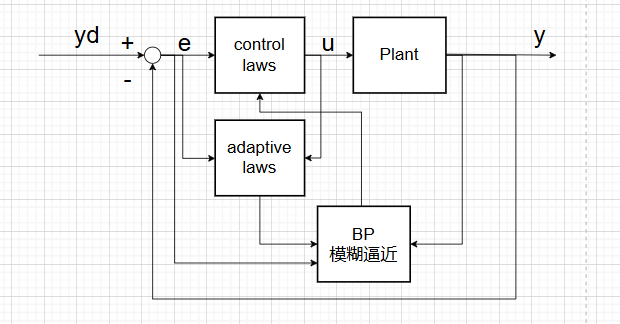
假设系统为未知非线性系统$\ddot{\psi} = f(x_2) + g(x_2),u$,使用RBF网络来逼近$\hat f(x_2) \approx f(x_2),\quad \hat g(x_2) \approx g(x_2)$
RBF神经网络结构为:
$$
\Phi_i(x_2) = \exp!\left( -\frac{(x_2 - c_i)^2}{\sigma^2} \right)\\Phi(x_2) = [\Phi_1,\dots,\Phi_N]^T\
\begin{aligned} \hat f(x_2) &= W_f^T \Phi(x_2) \ \hat g(x_2) &= W_g^T \Phi(x_2),\quad \hat g \ge g_{\min} > 0 \end{aligned}
$$
定义误差与滑模变量$e=\psi-\psi_d,s=\dot{e}+\lambda e$
控制律:
$$
u = \frac{ -\hat f(x_2) - k,s + \ddot{\psi}_d - \lambda e_2 }{ \hat g(x_2) }\
|u| \le 0.5
$$
自适应律:
$$
\dot W_f = -\gamma_f, s, \Phi(x_2) - \sigma_f W_f \W_f(k+1) = W_f(k) + \dot W_f\
\dot W_g = \gamma_g, s, u, \Phi(x_2) - \sigma_g W_g
$$
5.2 仿真建模和结果
由此建模
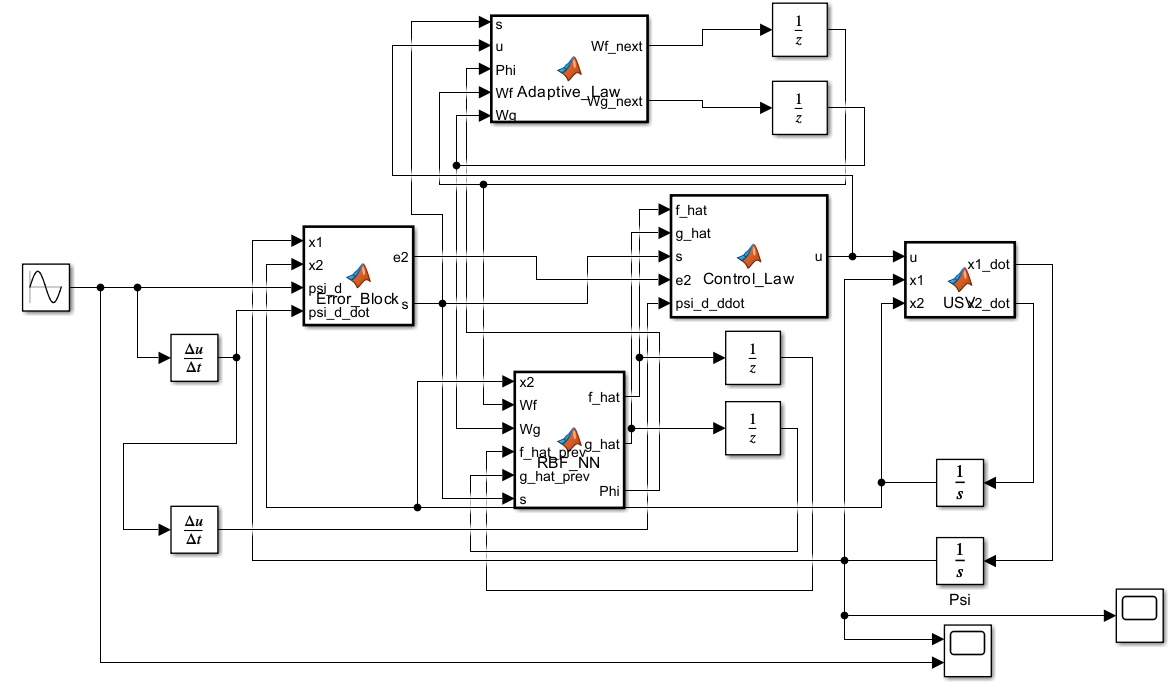
其中给Wf设置初始值为zeros(5,1);Wg设置初始值为ones(5,1)*0.5
误差处理模块,用于计算$e,\dot{e},s$
1 | |
RBF逼近
1 | |
控制律
1 | |
自适应律
1 | |
被控对象USV模型
1 | |
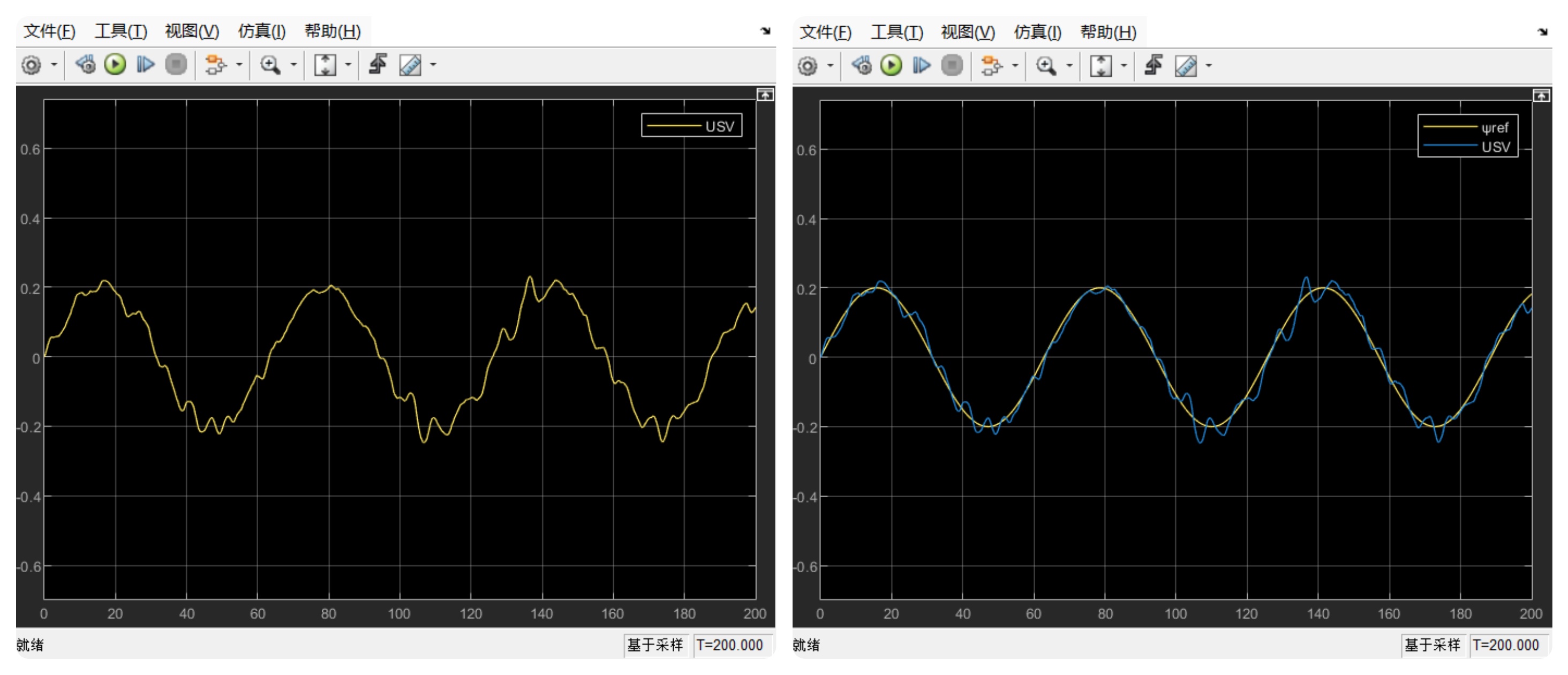
得到的结果为:(左图为纯输出,右图为输出与参考信号对比)
神经网络自适应控制器的效果非常好,几乎0误差而且时间长也不会出现失调现象。
在控制器输出的u上加白噪声扰动再运行,发现几乎依旧是0误差,鲁棒性非常强。